官方资料: BearPi-HM_Nano: 小熊派BearPi-HM Nano开发板基于HarmonyOS的源码 (gitee.com)
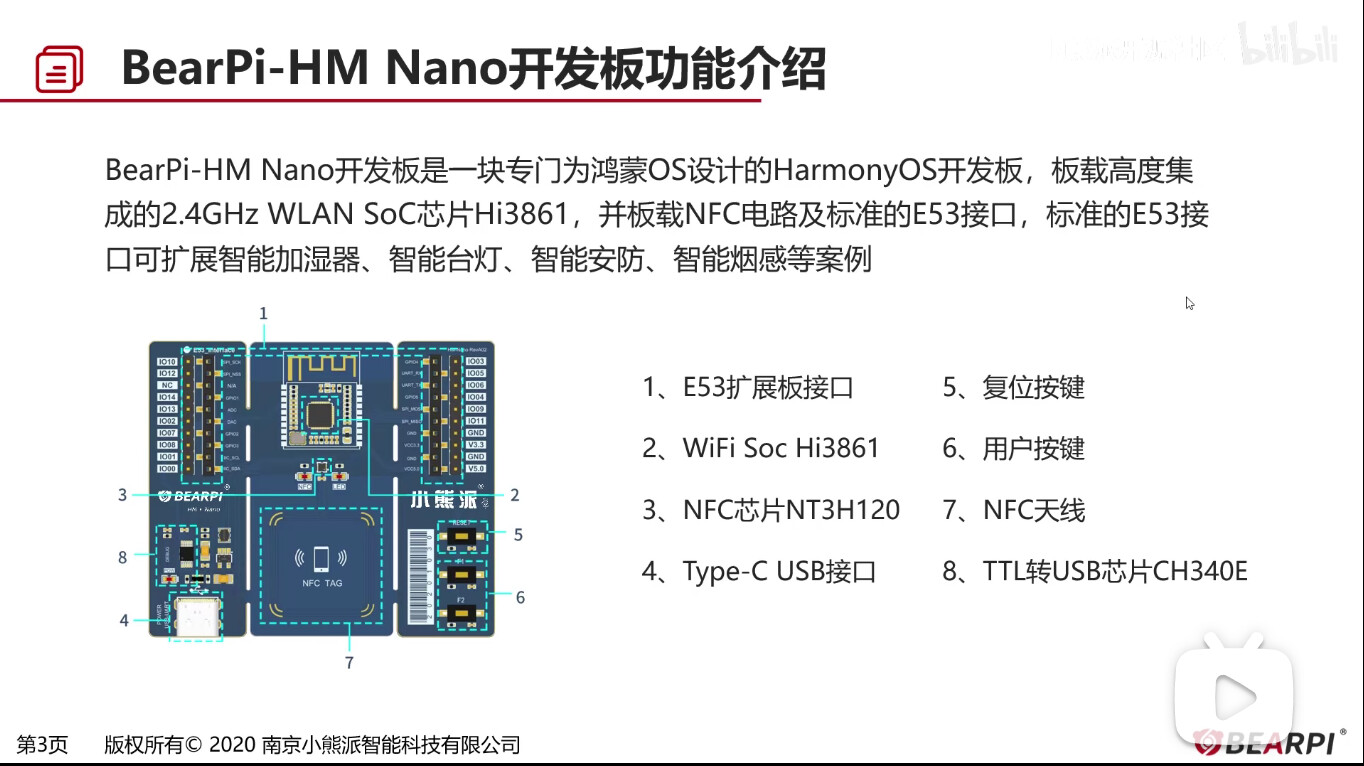
一、开发板介绍:小熊派-HarmonyOS·季 是一款由小熊派专为HarmonyOS系统打造的HarmonyOS开发板。
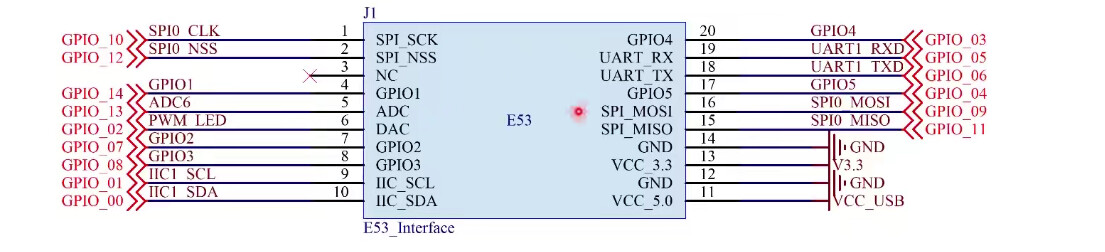
- 采用IoTCluB的E53接口标准,可接入所有的E53案例扩展板
- 主控为WiFi SOC Hi3861,160MHz主频,SRAM 352KB、ROM 288KB、2M Flash。
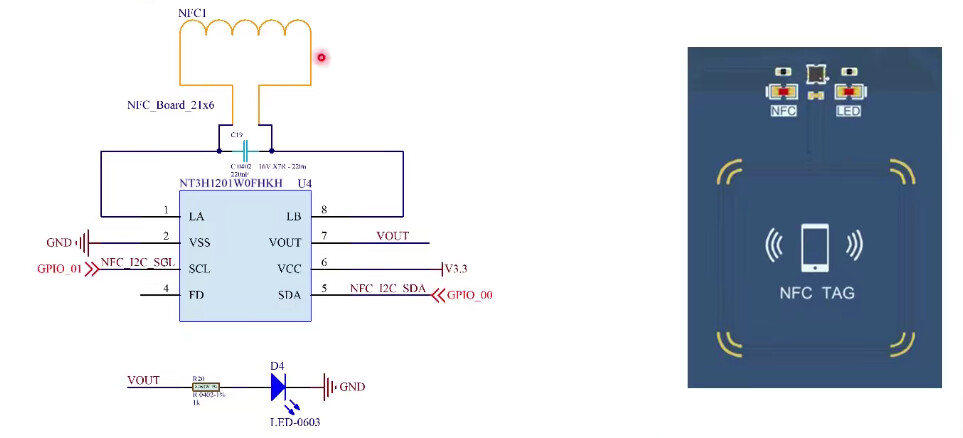
- 板载NFC Forum Type 2 Tag芯片及天线,可实现HarmonyOS“碰一碰”功能。
- 一根TypeC USB线,即可实现供电、下载、调试等多种功能。
目前来看,小熊派提供了较为完整的官方教程,是上手开发的较好选择
二、外部接口
2.1按键,开发板上提供了三个按键,分别是reset、F1,F2。其中reset是复位按键。f1和f2是用户自定义按键。
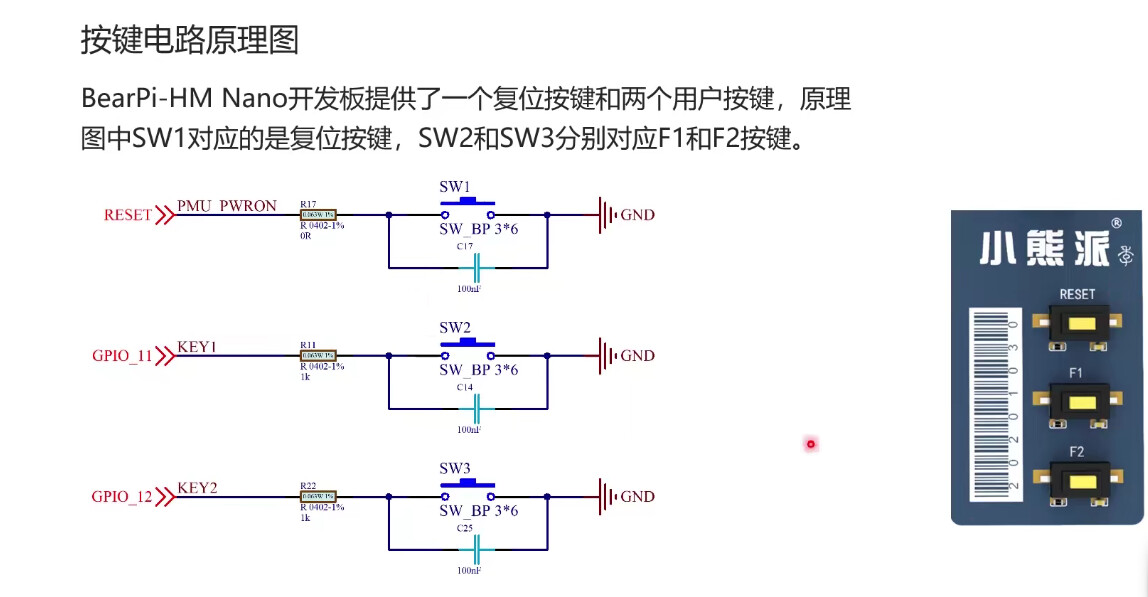
其中f1连接在GPIO11,f2连接在GPIO12上,默认高电平。(并联的电容是为了做按键的防抖动)
2.2LedBuiltIn ,开发板提供了一个内置的led灯,位置在soc的右下角,内部连接了GPIO2
2.3NFC 开发板板载恩智浦的NFC芯片,使用iic的协议
2.4E53接口

三、开发环境的搭建
官方给出的示例是在win环境下利用虚拟机进行的hm开发,由于这样不是很清真(X),所以本文将记录在linux环境下完整构建hm开发环境
小熊派官方给出的实例中只有windows下的开发方式,不是很爽。在查阅了openharmony的官方文档后发现华为的 DevEco Device Tool(后文简称为DDT)写到有小熊派的支持,并且给出了windows/linux下的环境构建方法。详细可以参照官方文档DDT-linux安装教程跟着教程走没有问题,唯一一点不同的是,在安装的时候,提示有一个文件夹不存在
于是乎,我们就去/root下mkdir一下就好了。。。(还是那个熟悉的华为,能把安装文件全整到一个sh里面也是厉害)
安装好后打开vscode就可以看到ddt的图标了

之后按照openharmony的开发文档进行依赖的安装。openharmony文档
有一点需要注意的是官方的命令中 zlib 无法安装 更改为zlib1g即可![]()
(其实这里有点点怪,毕竟*是通配符,不知道为啥没匹配,运行后发现已经安装)
下一步,注意如果你的系统是新鲜的,可能还没有装pip,先装一下。
sudo apt install python3-pip
注意每一个warning是个好习惯,去把path加上(自行bing)

最后一步安装gcc_riscv32这里,我感觉官方给的教程就离谱,给的tar指定路径不是这样用的把,然后还在路径里面用相对路径。。。
这里我的做法是,将文件解压缩,使用mv 命令
mv ./gcc_riscv32 ~/.gcc_riscv32
也就是把它放在了~/下的隐藏文件夹(眼不见心不烦),之后修改path文件,source一下再就好了(相应的路径写绝对路径)

唉,不得不说,华为能用shit code把这一堆功能堆出来也是真的厉害。在昨天完成了一系列的安装后,发现总是无法build。明明官方的文档已经结束了呀。最开始的报错是hpm not found。好吧,我去看看npm怎么装,于是在另一个地方找到了安装的说明 ohos-hi3861hpm。然后离谱的就是,hpm这个工具,他是用nodejs写的。。。。好家伙这一个工具链上出现了多少不同的工具了。。。。不愧是你,华为。。。

之后还需要把gn和nija的二进制文件拉下来,丢在环境变量里,然后再build就ok了。
到这里我们算是完成了初步的工作了!

豆皮怎么开始玩鸿蒙小熊派了
迫真项目 ![]()