引文
你协作为“水上之星”船模比赛强力选手,每年的三四月都是协会集体做船时间。这里做一个船模制作的经验汇总。欢迎大家补充指正。

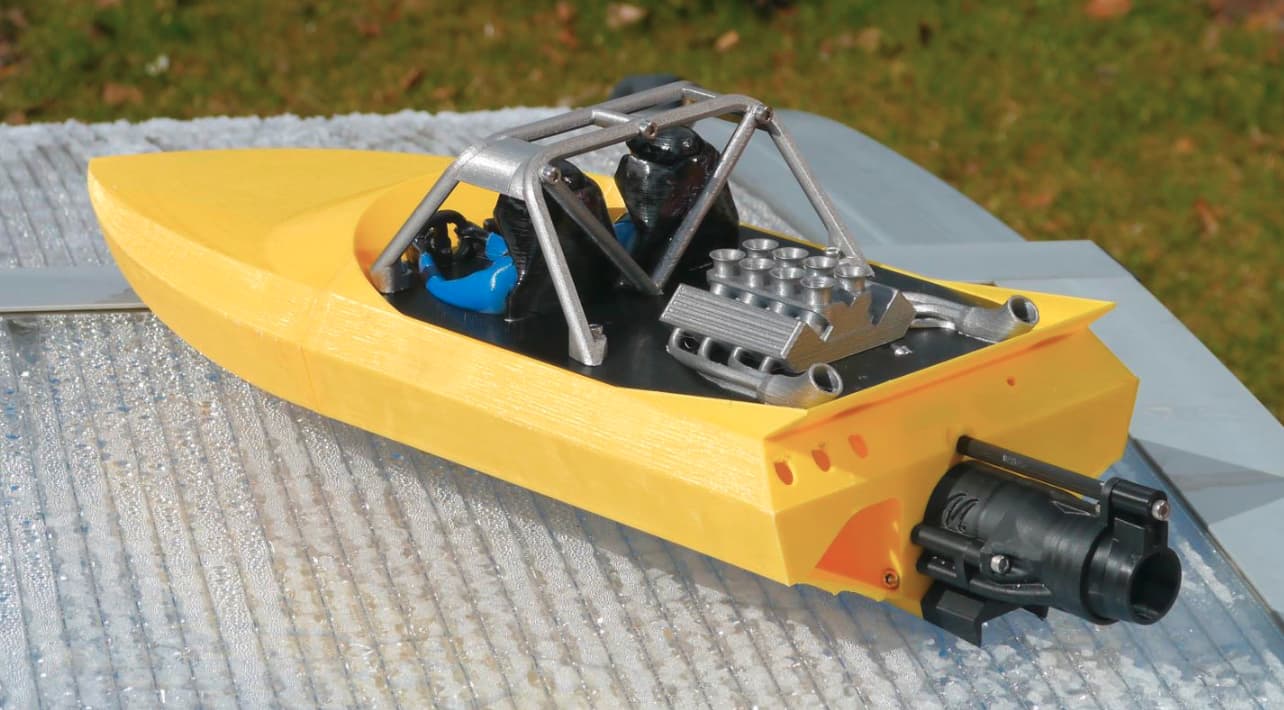
【望仔船照镇楼】
遥控接收器将来自发射器的油门和方向角度信号,处理成电流电位信号输入电调,电调给电机供电的同时通过改变电机电流大小间接控制电机转速,电调给舵机供电同时通过电位信号控制舵机转向角度。
电调全称叫电子调速器,顾名思义,就是用来给电机调速的,电机要想调速必须装上电调。电调一端连电机 一端连电池,还有一端连遥控的接收器
电调就是电子调速器,英文Electronic Speed Control,简称ESC。针对电机不同,可分为有刷电调和无刷电调。它根据控制信号调节电动机的转速。
比如我们手里有一个马达,如果我们直接把它和电源连接,那么它就会一直疯狂的转动;但如果加一个电调的话,我们就可以通过信号控制马达的速度了。
说明 只适用于刚入门的新手,大佬要喷的绕道。
RC车模电机电调的相关知识与选用
这一篇相对之前的讲的比较细比较啰嗦大家选择性的阅读。
早在七几年的已经有RC了,那个时候用的都是直流有刷,就大家小时候玩的四驱车上的那种电机 屁股后面两个接线柱,没有正负极怎么接就怎么正反转,价钱几十块钱就可以买到,手工绕的可能得一两百左右,拆开后盖上有两个小碳刷,那个小碳刷不光是磨损大而且给大电流的时候容易甭火花出来,有火花就会产生电磁波对车辆信号产生干扰,这是非常危险的容易失控。
九几年到零几年无刷系统开始兴起,无刷电机呢用的不是像有刷那样的直流电,虽然它接的是直流电源的,但他有个电调叫ESC(Electronic speed controller),电调把直流电变成矩形波脉冲,就是三相励磁电流,所以无刷电机取消了碳刷它是通过电流的变换来起到换向的作用,它不像有刷里面有个专门的换向器。
大家刚开始可能会接触到什么3650/3674/4074/4274这个四位数字的代号前两位代表的是电机的外观直径后两位代表电机的长度,比如4274就表示电机的直径是42mm长度是74mm(不算露出来轴)。
除了工业上用的无刷电机一般标额定功率,模型无刷电机一般不标功率,因为电机的功率和他的尺寸关系比较大,尺寸越大功率就越大,所以它只标一个尺寸。
大概的功率范围:36级别的900-1200w之间
40或42级别的在3000w左右
其实无刷电机的功率理论上是可以无限往上涨的,拖中国工业的福大家现在用的电机都是稀土永磁体磁性非常强,安培力做功使电机旋转(安培力是洛伦磁力的宏观表现),电流只要无限增大,电机的安培力就会无限增大,所以电流取无限大功率也就无限大。但是实际情况不是这样的。转子是有转速上限的,到一定速度自己就把自己砖碎的,也就是大家说的爆转子了,一般来说模型用的无刷电机的上限在5万转左右,所以你无论用什么电机它的空转极速都在5万。另外一个限制功率的因素就是电流的热效应,有电阻就会有热量,电流的热效应是制约无刷电机功率的最主要的原因。
永磁体在120°以上的时候磁性就会受到影响,如果你飙到了180-200°它就会退磁,退磁了那这电机就废了,退磁通常表现为你加油门它不走或者走的很慢极速也没有力量,这时候因为磁力消失了所以电机发热会非常严重,刚起步一个油门电机都会非常非常烫。所以天热大家玩车的时候注意一下散热,以后我会推出水冷方案,想了解的加一波好友。
无刷电机出厂的时候会标个最高转速和额定电压还有kv值,kv值在这里不是千伏的意思
无刷电机的转速和电压的升降有着严格的线性关系,就是说给它升1v的电压它的转速就要对应的升多少kv值的转速。电机出厂都不会标低速扭矩,这东西没办法标,只能自己算或者拿手感受。。。 扭矩的计算公式:9549*额定功率(kw)/额定转速(转速可以通过kv值来算)=扭矩(牛/米)。
无刷电机常见的有两个分类。一个是外转子无刷电机一个是内转子无刷电机。车船用的是内转子无刷电机,像空模无人机那些都是外转子,就是外壳在那转。两个的区别就是外转子的电机的扭力非常大但是极速不高,因为是壳在转所以转动惯量比较大。内转子扭矩适中,极速非常高。
看价格就知道了有感电机要比无感电机贵,无感电机的缺点就是低速扭矩特别低甚至还不如有刷电机,简单说一下原理:因为是三相励磁电流,矩形波的相位要和你当前电机的相位一一对应,因为电调不像人脑所以它不知道现在在啥位置该怎么输出哪个相位的电流,所以电调会不断的去试,给电机输不同相位的三相励磁电流,碰对了就走起来,所以无感电机在起步的时候会咔咔咔的一闪一闪的。有感就比较牛批了,有感电机里面有个霍尔传感器,这个传感器能感应出磁场之间的位置关系,所以电调就会知道电机停在什么地方然后直接输对应的电流,所以一些比赛用到的都是有感,入弯出弯都比较舒服,弹射起步也很顺畅,(低端的有感电机电调不防水)
电调你看字面意思就知道它是一个调速的设备,电调把电池的直流电通过一系列的振荡什么乱七八糟的电路变成交变电流(其实也算交流电只是方向不变大小变)如果数电学的好可以自己做电调,当然如果你能自己做也没必要看我写的东西了
有刷电调控制转速的是电压 给的电压越高转的就越快,改变转动方向就是改变电流的方向所以有刷电调比较便宜 因为结构特别简单。
无刷电调改变转速靠的不是改变电压,因为不经济难以实现,无刷电调靠的是输出电流的占空比不同,占空比指的就是在一个周期内给电流和不给电流的时间比值,占空比如果非常大接近于1的话那就是常开状态此时的车就是全油门,打个简单的比方,把电调比作一个开关,你拿手按这个开关的频率越快那车就越快。
电调上比较重要的部件就是电容,因为前面已经说过了电调输出的是矩形波,如果没有电容直接插电池的话不断的通断通断那电池用一次就坏了 经不起折腾,这个通断的频率都是赫兹级别甚至千赫级别的非常非常快,所以通过电容中电荷的吸放来达到充放电的作用。在电调上的作用一个是辅助送电一个是在全油门的时候瞬间给较大的电流。这里电容说的有点多了 不过这东西容易坏尤其固态电容很多新手不明所以电调一坏就买新的其实一个电容就几毛钱说不定换一个试试就能省一大笔钱(有动手能力的推荐,手残的别拆,别内部电路搞短路了)买的时候问问原电容耐压多少,多少uf看着对应买就行了。还有一个就是电调上的二极管这个是防插反设计的,如果插反二极管烧掉买一个焊上去就行了不用买新的电调玩车能省就省了,这两个问题都是比较常见的也是能够自己来解决的所以在这里多啰嗦一会。
电调写的多少A的,这里拿好盈sc8 120A来举例,这个A是什么意思呢?都知道电机的功率跟里面的电压没有关系跟电流有关系,所以你的电调能输送多大的电流就决定了它能带的动什么级别的电机,这个120A指的是持续工作电流是120A,根据这个电流你可以算出它的输出额定功率,但是不是说最大只能输出120,电调的最大电流是额定电流的两倍多一点
所以sc8的最大电流就在270A左右,最大电流只能维持10秒 过了10秒会过热会自动断电,这里只是理论值说明书上也不会给你写 玩车想省点钱就尽量不要全油门,这得参考环境温度,大东天的你随便拉极速
再说一下电调的电压识别 比如好盈一郎的max8只识别3-6s 买的时候多看参数 接的时候别乱接电池不会出啥大问题。
还有一个重要的参数就是电调的BEC输出,就是说这个电调为了带动舵机它会给接受一个信号线这个信号线就是它的BEC输出,BEC有两个指标一个是电压一个是电流,电流大家一般不用管只管电压就行,从低到高最低的有4.8v的BEC,这个已经很少很少了,大家了解即可 以后给别人讲还能装装逼,在往上有个6.4v,这个6.4v一般来说是所有电调BEC的标准值就算有内置高压BEC到手也要自己设置不然还是6.4v,再往上就是7.4v高压BEC了,高压输出只能带高压舵机,低压输出可以带高压也可以带低压。这里补充一下如果车上要改水泵什么的可以上淘宝买外挂的BEC根据你水泵的电压去选,也不贵三四十块钱一个,其他改装电子设备同样,这里只是拿水泵做例子(补充一个小知识:低速车无所谓,如果你是玩大脚一类的暴力车,除非真的有联动的必要,能做独立电源就不要接受取电,比如你接一个灯过个水灯短路了那么电调和接受都有可能烧掉,只是给新手提个醒,如果你不缺这点钱那你随便玩)
这个选择是根据你自己的车来的,无感电机比如10车36级别就可以了,有感电机540和无感3650是一个级别
8车至少40级别的电机,4074/4274都比较合适
5车电机比较贵一点起码50级别
一般来说4s的kv值选2000kv左右
6s1500-1800kv
2s三四七随便跑都没问题
电调你购买的时候你先看你选的是什么电机再看你用多大的电池
36级别电机60A就足够了
如果42级别的话用120A以上
电调就是个水龙头 这个水的大小一看水龙头多大而看你水源多大
这个水源就是你的电池,因为电池没讲所以先搁置一下
电池太过复杂定义和概念都太多,所以到了下次电池篇的时候再详细说
品牌就好盈 多的不讲大家都懂国产车虽然不怎么样但是国产好盈世界顶级
船壳的选择是基于外形、速度和操作目的这些由个人偏好。有几个不同类型的船壳。
船壳的长度大大的影响了速度、动力操作、稳定性以及水面操作条件。船体越大就能控制更高的速度、更强的动力,而且在所有水面条件下会更稳定。这个典型地适用于下列所有的船体类型。
单体船/MONO----最普遍的,有一个通常是V型的单船体组成。在比较多波浪的条件下表现出色,速度比较慢,比较难控制。最容易组装。平衡度@20-35%
双体船/CAT—由两个在中间部分的配有隧道的外在安定翼组成。提高的速度和操控,波浪水面表现好。很容易祖装。平衡度@25-35%
涵道/Tunnel—由两个在中间部分的配有隧道和通风帽的外在安定翼组成。以外在电机为动力装置。速度高和易控制,在波浪水面表现一般。组装有一定难度。平衡度@25-35%
虾艇—规模大的电力—为速度/操控而设计
高速易控制,在波浪水面表现一般。难以组装。前安定翼的机翼后缘保持平衡。
OUT Ragger—为最小的阻力设计。由配有吊杆的窄小中心盆组成,安定翼弥补了到盆的距离。绝佳的速度和控制。波浪水面表现差。最难组装。平衡度@前安定翼的机翼后缘或者几英寸后。
当FE 新手开始玩船时会犯的最大的错误,就是选择一个没有正确匹配的动力组合。大多数情况下这会导致过热。热量是电子设备最大的敌人,太高的温度必将损坏任何的电子组件。
在过去的几年,在选择无刷电机的时候最难做的的决定就是选择KV值。请了解了之后再做选择。
在一个电船里,组成一个完整的动力系统的五个关键部分就是以下几个:
-电池
-船体
-电调
-电机
-桨
选择这个组件最好的顺序就是
1) 船体
2) 电池
3) 电机
4) 电调
5) 浆
新手不会选的话请一定要咨询有经验的人士,或者直接抄作业,不要自己买错了型号。
为船体选择一个适合的电机,了解船体的尺寸和所用电池的数量是很重要的。船体的尺寸将决定用于电机的参数。电池的数量将决定了所需电机的KV值。
20”/55cm – 34”/86cm的船体一般使用一个540的电机,直径为36mm,长度是50-75mm。
34”/86cm – 40”/102cm的船体使用直径为42mm或以上,长度在60mm以上的电机。
决定一个电机最适合的KV值,需要用到计划使用的电池数量。下面的图标为选择正确的KV值提供了一个广泛的根据。
2 cell LiPo > 3000-5500Kv
3 cell LiPo > 2000-3500kv
4 cell LiPo > 1350-2700Kv
6 cell LiPo > 900-1800Kv
8 cell LiPo > 675-1350Kv
10 cell LiPo > 550-1100Kv
12 cell LiPo > 450-900Kv
这大概是基于一个每分钟转数的范围。这个范围大约是20000RPM-40000RPM,在这个范围里面,大约30000RPM是对几乎所有模型船的一个最适合的标准。大于40000RPM可能认为是一个SAW(方法单一的)装备,这里不予以讨论。
MONO船所需的KV值比较低则需要比较大的桨)
OUTRIGGE船型的船体需要的KV值比较高端则需要较小的桨)
较高质量的电机可承受比较高的KV值。
较低质量的电机用比较低的KV值。
电调控制着从电池到电机的电力。为了能操控电流消耗,必须根据电机的要求正确地选择电调。
这里推荐选择高质量的电调。最普通的电调就是Castle Creation制造的HV和LV Hydra120.很多时候,这些高压和低压电调会控制大部分的装置。确保所选的电机不会超过电调的最大连续额定电流。如果它确实超过了,这就需要一个较高的额定电调。
当使用多于4s LiPo或者12-14NiMh的电池,在电机上面断开BEC和使用一个4或者5 cell NiMh接收包或者有调压器的2 cell LiPo 是一个明智的选择。断开BEC使电调上的中心线移到RX lead。如有需要,可以把用针把它推出去,稍后替换。
根据电机制造商的推荐为电机调速。如果不懂得。就保持低速。例如,Nec 1D电机一定是设定为低时序。
切掉电压的标准是每个电池3.0v。然而,如果你使用的电池不需要太大的电力,为了早一点停止运行,我建议把数值提高一些,给接收包留一些容量。
为使用而选择正确的桨是最难做的决定。太大的桨必然会损毁电子组件。太小的桨不能让船运行。不是电压损毁了电机,而是它的电流和最大转动速度损毁了电机。电流是由电机的负荷所控制的。
如果不知道一个保守的桨的特定使用方法是什么,我建议你去寻求意见。每一个组合都是不一样的!
2 cell LiPo 6 cell NiMh – 30mm - 40mm Diameter
4 cell LiPo 12 cell NiMh – 37mm - 46mm Diameter
6 cell LiPo 18 cell NiMh – 40mm - 52mm Diameter
8 cell LiPo 24 Cell NiMh – 45mm – 55mm Diameter
10 cell LiPo 30 cell NiMh + - 48mm+ Diameter
理解这个图表是很基础也是极为重要的。对于任何特定的组合,最好的或者最保守的桨可能不在这个范围内。
较大的桨会增加负荷,增加的负荷将导致电流消耗的增加。较小的桨会减小电流消耗。较高的桨节距会增加电流消耗,较点的会减小电流消耗。
较大的桨可能会制造出稳定问题,使它难于在转角运行并制造扭力转向。在较低速时使用一个较大的桨的一个好处就是有推动力。在水平上加速会更大。因为很少会滑动,所以使用较大的桨效率更高。
较小的桨在追成平局时可能滑动更大,加速较小,但有几个优势。它们一般在转角运行时操控更稳定,在艰难的加速下不会使船体转出赛道。
一艘船的电池数量最好是根据船体总长度来选择。下面的一览图决定了,在提供最佳速度、表现和控制动力的同时,一个特定的船体需要的电池。
20”-27” / 55cm-68.5cm > 2 cell LiPo / 5000mAh / Min. 25C
25”-31” / 63cm-79cm > 3 cell LiPo / 5000mAh / Min. 25C
27.1”-34” / 69cm-86cm > 4 cell LiPo / 5000mAh / Min. 25C
34.1”-40” / 86.5cm-101.5cm > 6 cell LiPo / 5000mAh / Min. 25C
40.1” + / 102cm + > 8-12 cell LiPo / 5000mAh / Min. 25C
1P建议在每个范围较小的长度,低电流消耗低KV值
2P建议在每个范围较长的长度,较高电流消耗和增加可靠性的KV值
S=串联。当电池串联起来电压增加,容量不变。
P=组。当电池平行容量增加,电压不变。并联包会延长跑船时间,增加最大的连续拉力,提高可靠性和减少并联包的储热。
这只是一个一般的指南,并不意味着在35船体上你不能用8甚至10电池船桨。
注解:
并联保不能增加C等级。C等级是一个特定等级,不能改变的。并联保使容量加倍,也就使有效的恒定电流加倍。
当船体最终完成并有一个很适合的动力系统,遵循以下的几个步骤是很重要的。
为一个特定的装置选择一个最保守的桨之后,装载部件和把船体放在水面上跑45秒。45秒之后,拿起船体,记下电调、电机和电池的温度。如果所有的部件都140F/60C之下,再跑45秒。如果温度仍在这个标准以下,继续跑45秒,继续这个模式。
如果温度超过了安全界限,那要么超过了最大的可跑时间,要么用过大的桨,要么两者都有。减小桨的尺寸或者跑船时间。
遵循这几个简单的规则会增加成功跑船的机会,一次或者一百次
为了更加安全,只做几次总共是20-30秒的,然后拿起船体。检查温度是不容易,但可以省很多钱。
设备升温有几个原因,这里的情况可能是起因。过热 – 高于140F/60C。很多时候,设备过热不只是一个原因。在这种情况下,选择最合理的修理。
可能的原因
-没有推动轴承,当使用推力的时候产生额外阻力
-轴内捆绑。当电机连接不上,旋转桨轴也无补于事
-过多桨
-过长跑船时间
可能的烟瘾
-电调不适合电机 – 超过了直流电界限。这时需要较大的额定掉条
-过长跑船时间
-电池消耗太多的电流。增加容量或者C等级。只用最大值为80%是可计算的最大放电率。
-一次跑船时间过长。确保不要转储包或者切断低电压
如果所有的部件都小于60C或者140F,你的装备就足够了。
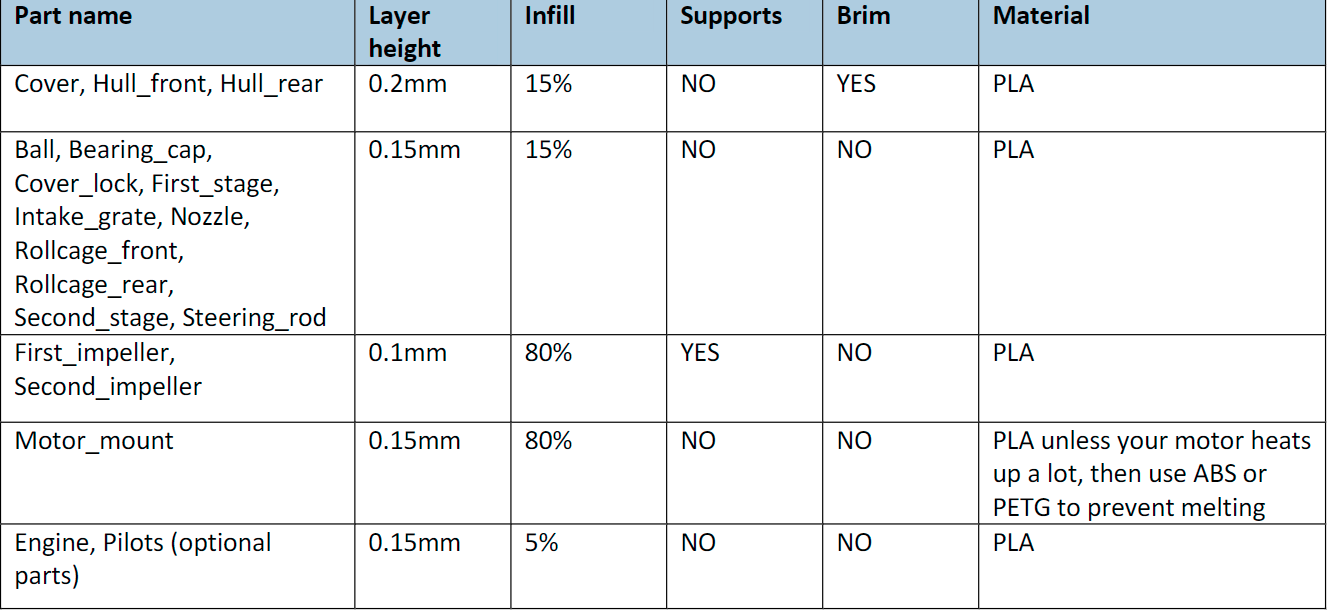
3D打印资料共享链接:
制作部分主要参考 M-Jet Sprint Manual 文件:
https://cloud.scumaker.org/s/aeTyaYsmPqkfrdT
这里面有完整制作步骤可供参考。
一些注意部分:
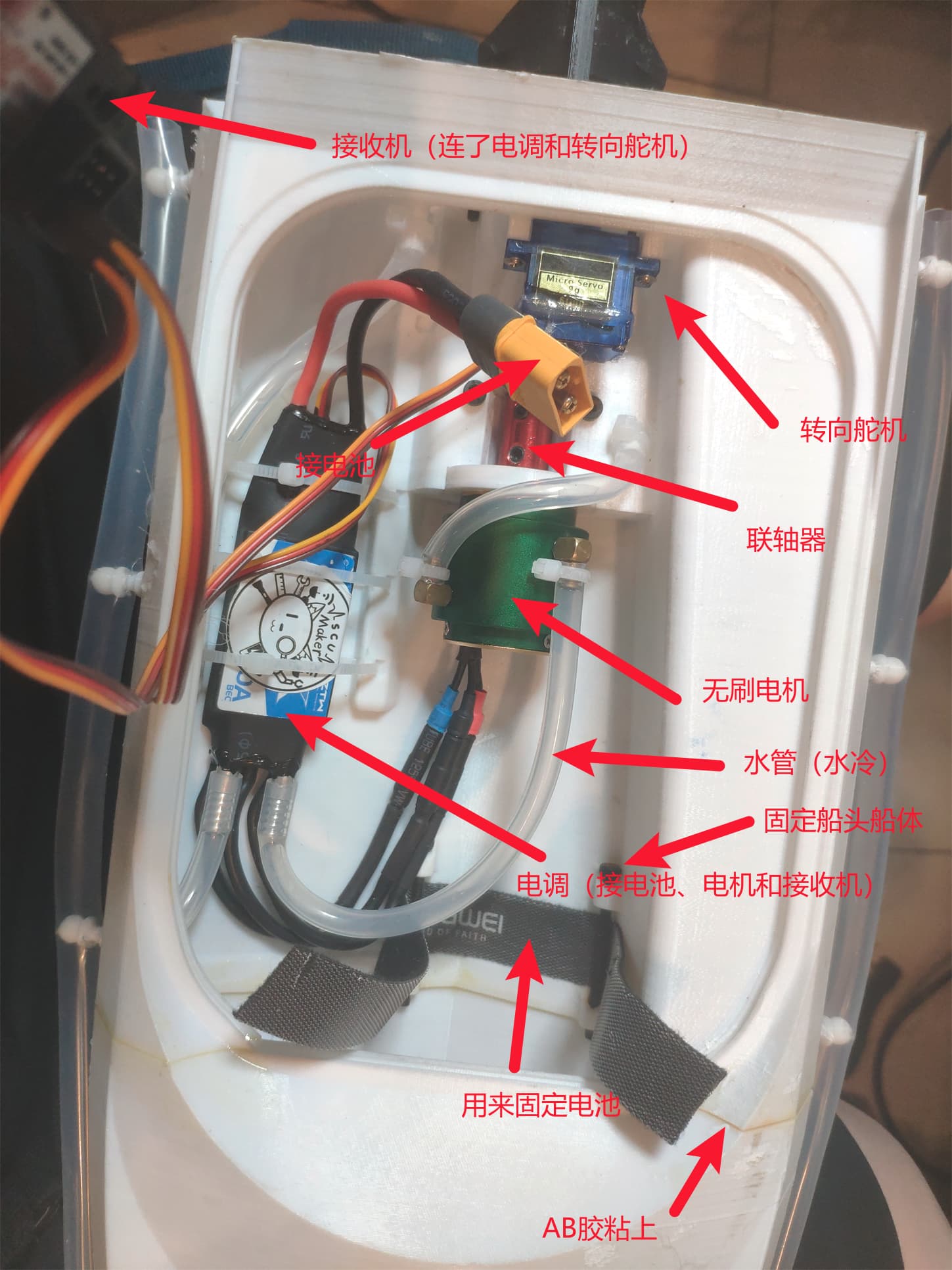
上面那个参考文件是不带遥控部分的,我目前使用的是现成的接收机和遥控器,你也可以自己制作接收和遥控(进阶操作),也欢迎大家开源分享自己的接收和遥控
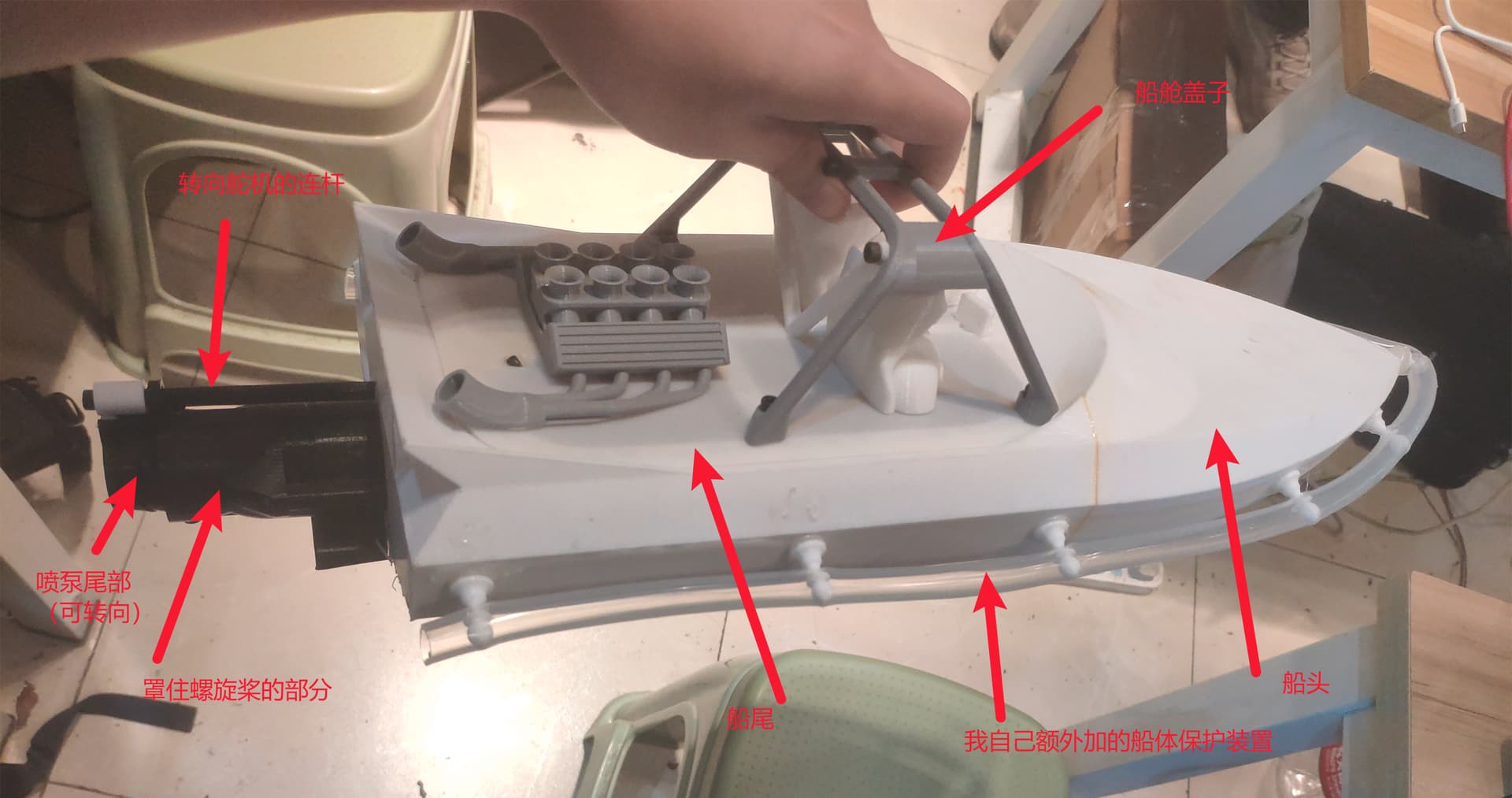
船的防水是个重要问题,这艘船主要是轴的地方容易进水,可以涂上油来防水
船体虽然有一定强度,但是也不禁撞,我个人是加了水管作为栏杆防护,新手跑船一定不要开太快
腐竹 Arduino + nrf24l01的水上之星船模遥控代码。跳频+自动筛选频点+配对:
网上的WiFi遥控螺旋桨船帖子 WIFI 遥控螺旋桨船 - MAKE 趣无尽