Maker 五月昇腾技术讲座
本次讲座讲解华为 MindSpore 与 Atlas 200 DK 的使用
前置知识
必修
C++:Linux 环境下的 C++ 语言开发、CMake 工程Python:全部语法、第三方库管理- 深度学习原理
- Linux 基本应用
选修
- CUDA (Compute Unified Device Architecture) 编程
- 计算机网络(以调试网络问题)
- 嵌入式开发
工具软件
必选
- 可以看到已连接用户 IP 地址的路由器
- 镜像烧录工具:推荐
balenaEther ssh终端:推荐MobaXTerm- 支持
ssh远程开发的开发工具:本人使用VS Code与CLion C++与Python的开发环境- 本次实验使用镜像:5.0.4alpha005-catenation-32G-20220111.img.zip
可选
- 华为官方全流程开发工具链:
MindStudio
术语约定
- 主机:指开发使用的主机
- Host:运行逻辑代码的处理器
- Device:运行 AI 代码的处理器
- Tensor:张量,一个高维矩阵
实验流程
认识昇腾
昇腾计算产业
参阅昇腾计算产业概述
昇腾计算产业是基于昇腾系列(HUAWEI Ascend)处理器和基础软件构建的全栈 AI 计算基础设施、行业应用及服务,包括昇腾系列处理器、系列硬件、CANN(Compute Architecture for Neural Networks,异构计算架构)、AI 计算框架、应用使能、开发工具链、管理运维工具、行业应用及服务等全产业链。
昇腾系列处理器
2018 年 10 月 10 日的 2018 华为全联接大会(HUAWEI CONNECT)上,华为轮值 CEO 徐直军公布了华为全栈全场景 AI 解决方案,并正式宣布了两款 AI 芯片:算力最强的昇腾 910 和最具能效的昇腾 310。https://mp.weixin.qq.com/s?__biz=MzA4MTE5OTQxOQ==&mid=2650027367&idx=3&sn=a295c720f68c3441825f804ffcb765d5&chksm=87983d33b0efb4251fa393af2092b734121c2191ba1aeab13723f601f4544b366bf88e385eca&mpshare=1&
参阅华为海思官网介绍:海思 - 404页面
昇腾(HUAWEI Ascend) 310 是一款高能效、灵活可编程的人工智能处理器,在典型配置下可以输出 16TOPS@INT8, 8TOPS@FP16,功耗仅为 8W。采用自研华为达芬奇架构,集成丰富的计算单元,提高 AI 计算完备度和效率,进而扩展该芯片的适用性。全 AI 业务流程加速,大幅提高 AI 全系统的性能,有效降低部署成本。
昇腾 310(HUAWEI Ascend)是一款华为专门为图像识别、视频处理、推理计算及机器学习等领域设计的高性能、低功耗 AI 芯片。芯片内置 2 个 AI core,可支持 128 位宽的 LPDDR4X,可实现最大 22TOPS(INT8) 的计算能力。
昇腾(HUAWEI Ascend) 910 是业界算力最强的 AI 处理器,基于自研华为达芬奇架构 3D Cube 技术,实现业界最佳 AI 性能与能效,架构灵活伸缩,支持云边端全栈全场景应用。算力方面,昇腾 910 完全达到设计规格,半精度(FP16)算力达到 320 TFLOPS,整数精度(INT8)算力达到 640 TOPS,功耗 310W。
神经网络计算架构:CANN
简介
AI 场景的异构计算架构,通过提供多层次的编程接口,支持用户快速构建基于昇腾平台的 AI 应用和业务。

CANN 的下载分为社区版和商用版,二者都是免费下载的。
- 社区版更新速度快,可以即时体验最新功能;
- 商用版更新速度慢,更加稳定
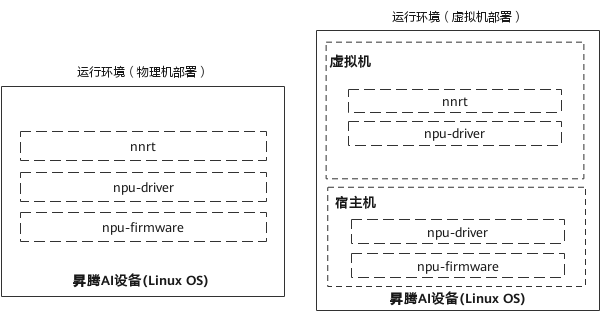
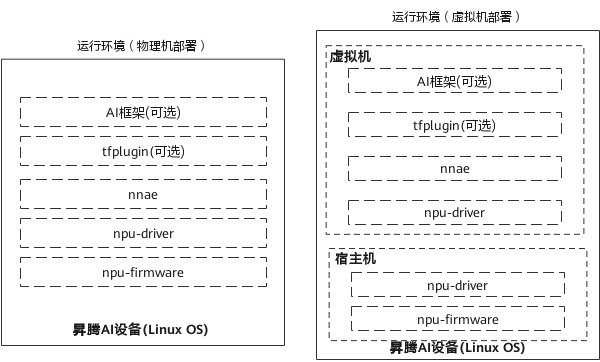
CANN 又分为nnrt和nnae两种发行版,其中nnrt只包含离线推理运行时,nnae包含离线推理、在线推理、训练的运行时。
开发文档
https://support.huaweicloud.com/instg-cann51RC1alpha1/instg_000002.html
AI 计算框架:MindSpore
简介
MindSpore 作为新一代深度学习框架,是源于全产业的最佳实践,最佳匹配昇腾处理器算力,支持终端、边缘、云全场景灵活部署,开创全新的 AI 编程范式,降低 AI 开发门槛。MindSpore 是一种全新的深度学习计算框架,旨在实现易开发、高效执行、全场景覆盖三大目标。为了实现易开发的目标,MindSpore 采用基于源码转换(Source Code Transformation,SCT)的自动微分(Automatic Differentiation,AD)机制,该机制可以用控制流表示复杂的组合。函数被转换成函数中间表达(Intermediate Representation,IR),中间表达构造出一个能够在不同设备上解析和执行的计算图。在执行前,计算图上应用了多种软硬件协同优化技术,以提升端、边、云等不同场景下的性能和效率。MindSpore 支持动态图,更易于检查运行模式。由于采用了基于源码转换的自动微分机制,所以动态图和静态图之间的模式切换非常简单。为了在大型数据集上有效训练大模型,通过高级手动配置策略,MindSpore 可以支持数据并行、模型并行和混合并行训练,具有很强的灵活性。此外,MindSpore 还有“自动并行”能力,它通过在庞大的策略空间中进行高效搜索来找到一种快速的并行策略。
https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/white_paper/MindSpore_white_paperV1.1.pdf
开发文档
https://mindspore.cn/docs/zh-CN/r1.7/index.html
开发工具链:MindStudio
昇腾论坛
Gitee Ascend/samples
应用开发基本流程
确定需求与问题
- 为什么有需求?
- 要解决什么问题?
- 为什么要用 AI?
- AI 能否解决问题?
- 有没有其他方案解决同样问题?
- 别人是如何处理这个问题的?
如果你的需求是区分红色还是黑色,请不要用 AI 解决
如果你的需求是区分三角形和正方形,请不要用 AI 解决
如果你的需求是计算 a + b,请不要用 AI 解决
开发算法
- 理解问题
- 论文调研
- 实验验证
模型训练
模型部署
- 内存分配与回收
- 模型装载与卸载
- 设备能力的调用
测试验收
Atlas外观与接口
Atlas 200 DK 开发者套件(型号 3000)是以 Atlas 200 AI 加速模块(型号 3000)为 核心的开发者板形态的终端类产品。主要功能是将 Atlas 200 AI 加速模块(型号 3000)的接口对外开放,方便用户快速简捷的使用 Atlas 200 AI 加速模块(型号 3000),可以运用于平安城市、无人机、机器人、视频服务器等众多领域的预研开发。
Atlas 200 AI 加速模块(型号 3000)是一款高性能的 AI 智能计算模块,集成了昇腾 310 AI 处理器(Ascend 310 AI 处理器),可以实现图像、视频等多种数据分析与推理计 算,可广泛用于智能监控、机器人、无人机、视频服务器等场景。
目前市面上的Atlas有IT21DMDA(旧主板)和IT21VDMB(新主板)两个版本,Maker新到的一批都是新主板。新旧主板可以按照Atlas 200 DK 技术白皮书第 15 页的配图区分。以下以新主板为例讲解,请参阅Atlas 200 DK 技术白皮书。
首次启动
镜像烧录
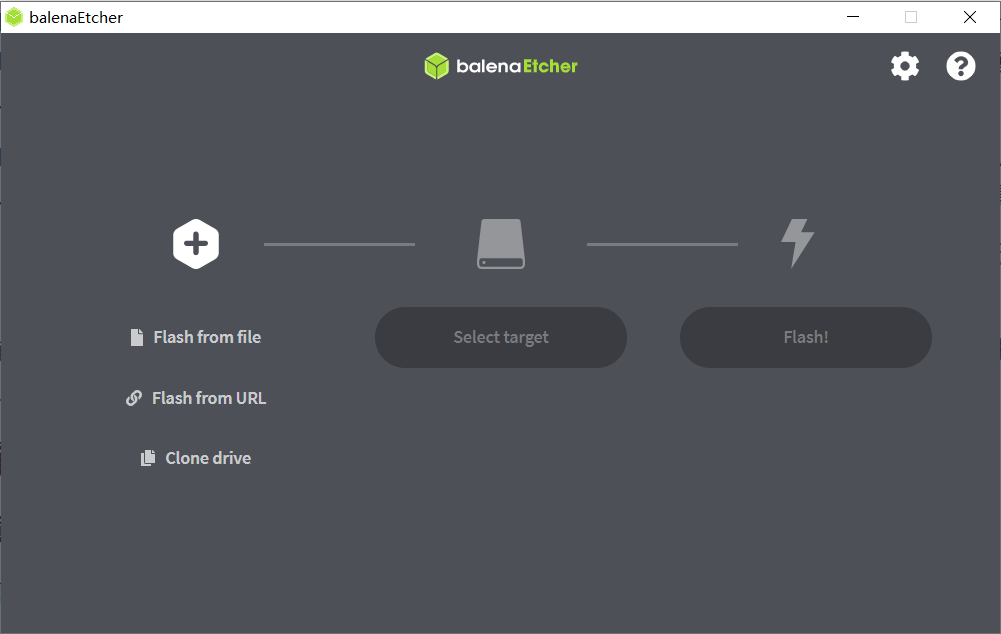
把刚刚的镜像拿下来,把 SD 卡插到电脑上,打开balenaEther,选文件为刚刚的zip压缩包(不必解压),选设备为你的SD卡,点击Flash!,整个过程需要大约半个小时完成。
启动
打开Atlas上盖以观察 LED 状态灯,将烧录好的 SD 卡插入Atlas 200 DK读卡槽,接通电源,观察到主板上 LED 灯从网线口到 GPIO 针依次亮起,四灯全亮说明正常启动,如果十分钟之后还是没有四灯亮起,请参见本文从失败中救赎

连接网络
将Atlas与Host连接到同一局域网内,使得计算机可以通过网络访问Atlas。
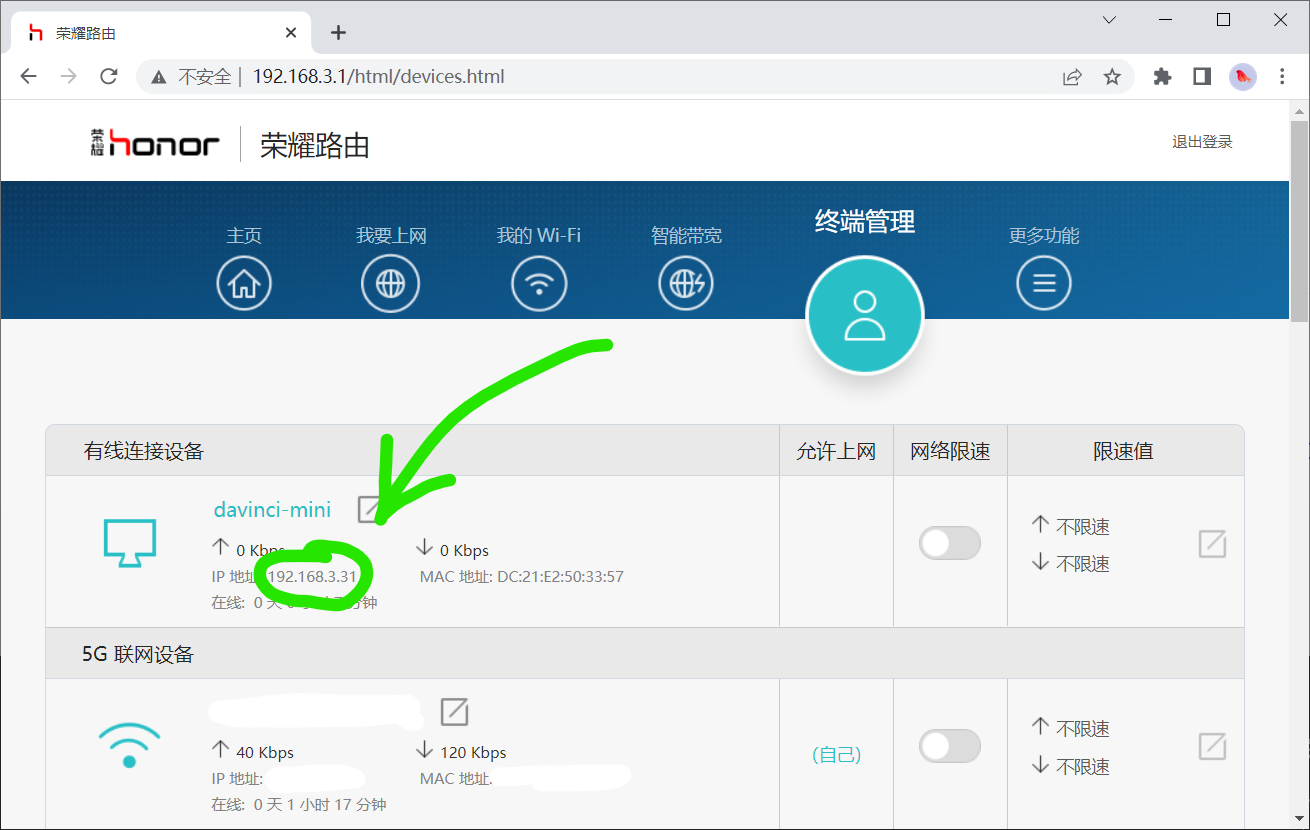
在下图中,我将路由器接入公网,Atlas以有线方式接入,主机以无线方式接入。

访问路由器的管理界面(地址可以在路由器的说明书或底部找到),查看davinci-mini的IP地址。这里是192.168.3.31,每个局域网都不一样。为讲解方便,以下统一使用192.168.3.31代指Atlas的IP。
首次登录
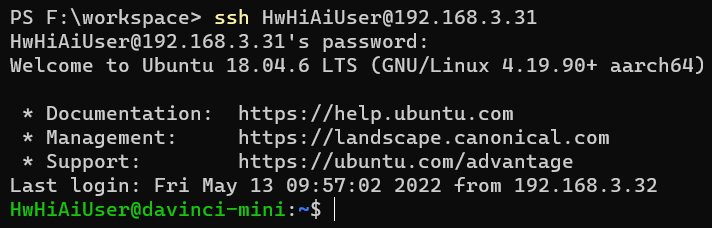
打开ssh终端程序,按照以下配置进行连接:
- 远程主机:上边看到的
ip地址 - 用户名:
HwHiAiUser - 密码:
Mind@123(默认密码) - 端口:
22(ssh协议默认。一般不需要配置)
如果是通过命令行会是这样
软件升级
如果按本教程的镜像烧录配置的,无需手动配置,apt已配置为华为云开源镜像站,pip已配置为阿里巴巴开源镜像站。
使用以下命令更新软件包。如果不更新可能造成一些奇奇怪怪的错误。
sudo apt update && sudo apt upgrade -y
记住,密码是Mind@123。
修改密码
如果这台设备所处的局域网会有不受信任的设备接入的话,请修改密码。相信聪明的你一定知道Linux下如何修改用户密码。
passwd
放置ssh公钥
这一节合并到VS Code远程登录中了。
熟悉开发环境
这个镜像里是装好所有所需驱动的,但是为了防止意外,也为了后续开发方便,需要运行样例进行测试以保证安装正确。
巧妇难为无米之炊,我们先搞到一手代码。
Ascend/samples
昇腾官方维护的Gitee仓库中有大量的代码供学习与使用,我们通过这个机会来搭建开发环境。
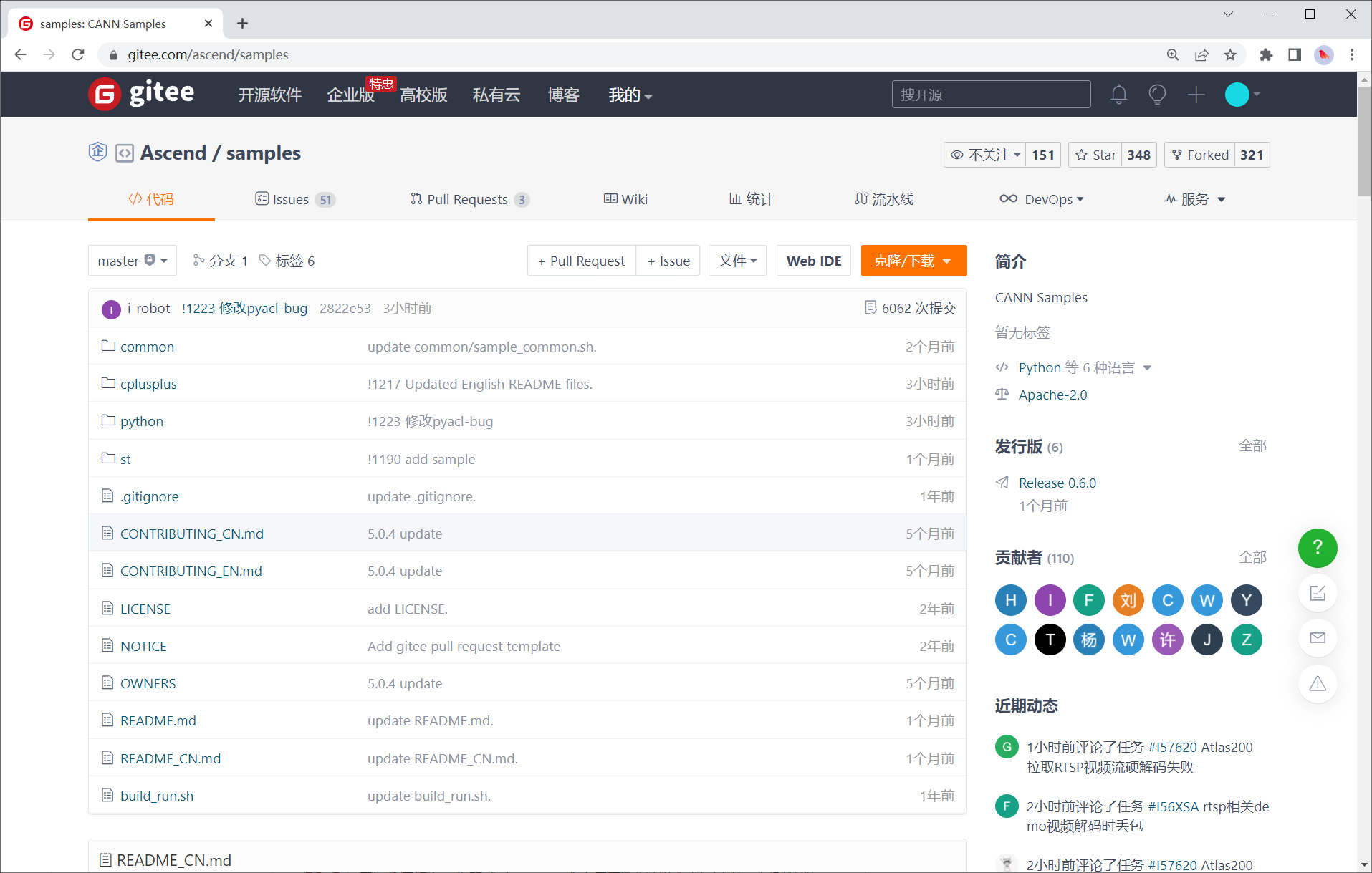
git clone
可以直接git clone,也可以下载最新release包。
刚刚已经ssh到Atlas上了,继续用那个终端执行
HwHiAiUser@davinci-mini:~$ git clone https://gitee.com/Ascend/samples.git # 获取存储库
Cloning into 'samples'...
remote: Enumerating objects: 62315, done.
remote: Counting objects: 100% (144/144), done.
remote: Compressing objects: 100% (91/91), done.
remote: Total 62315 (delta 71), reused 79 (delta 48), pack-reused 62171
Receiving objects: 100% (62315/62315), 385.44 MiB | 6.53 MiB/s, done.
Resolving deltas: 100% (40512/40512), done.
Checking out files: 100% (3403/3403), done.
HwHiAiUser@davinci-mini:~$ ls # 看到多了一个 samples 文件夹
Ascend hdc_ppc hdcd ide_daemon samples tdt_ppc var vf0
HwHiAiUser@davinci-mini:~$ cd samples/ # 进入并查看
HwHiAiUser@davinci-mini:~/samples$ ls
CONTRIBUTING_CN.md CONTRIBUTING_EN.md LICENSE NOTICE OWNERS README.md README_CN.md build_run.sh common cplusplus python st
HwHiAiUser@davinci-mini:~/samples$ git checkout v0.6.0 # 切到 v0.6.0 tag
Note: checking out 'v0.6.0'.
HEAD is now at 1a8e9580 !1179 VPC通道任务深度可配 Merge pull request !1179 from wx/master
HwHiAiUser@davinci-mini:~/samples$ ls
CONTRIBUTING_CN.md CONTRIBUTING_EN.md LICENSE NOTICE OWNERS README.md README_CN.md build_run.sh common cplusplus python st
Vim的使用
我们已经在远程开发了,刚刚在终端里敲的每一个字符都是基于ssh协议通过网线和路由器到开发板上的,并piggy back回来的。那让我们用vim写代码吧!
HwHiAiUser@davinci-mini:~/samples$ cd cplusplus/level2_simple_inference/2_object_detection/YOLOV3_coco_detection_picture/src/
HwHiAiUser@davinci-mini:~/samples/cplusplus/level2_simple_inference/2_object_detection/YOLOV3_coco_detection_picture/src$ vim main.cpp
不对吧,都 21 世纪 20 年代了,还有人用vim敲工程?
VS Code远程登录
忆苦思甜,刚才是忆苦,现在是思甜。
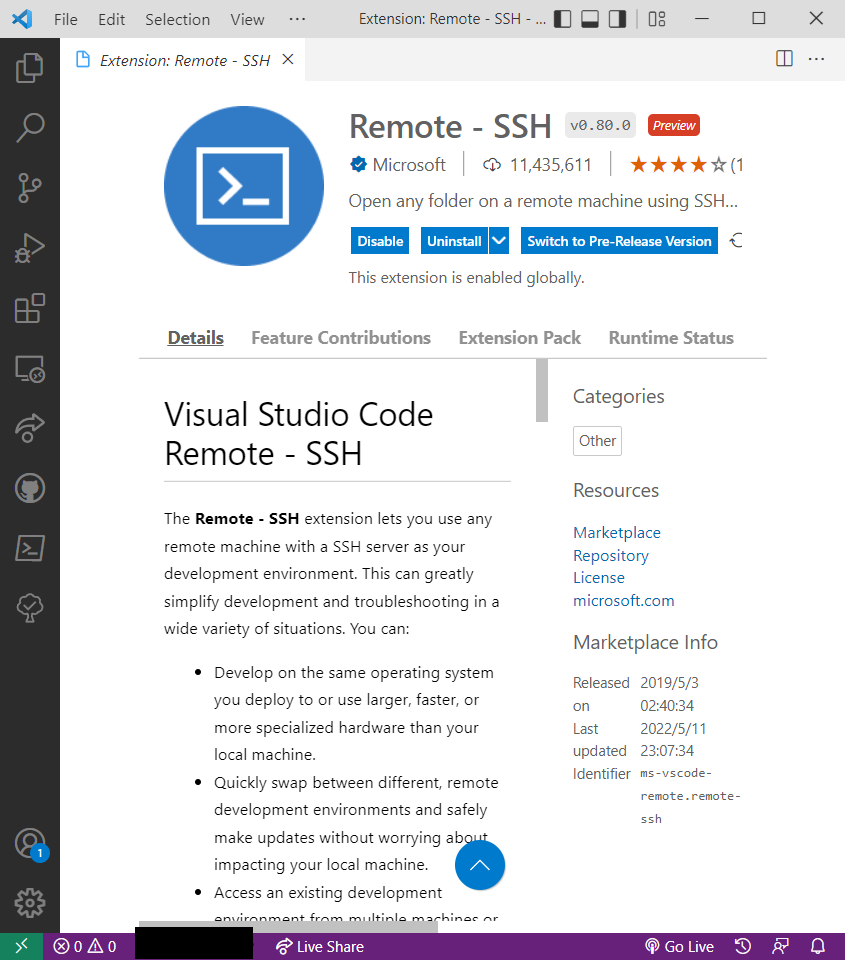
首先把这个下载量一百多万的 Extension装上。
或者点击这个链接直接调起 Code:vscode:extension/ms-vscode-remote.remote-ssh
然后点击屏幕右下角的Open a remote window,选择Connect to Host
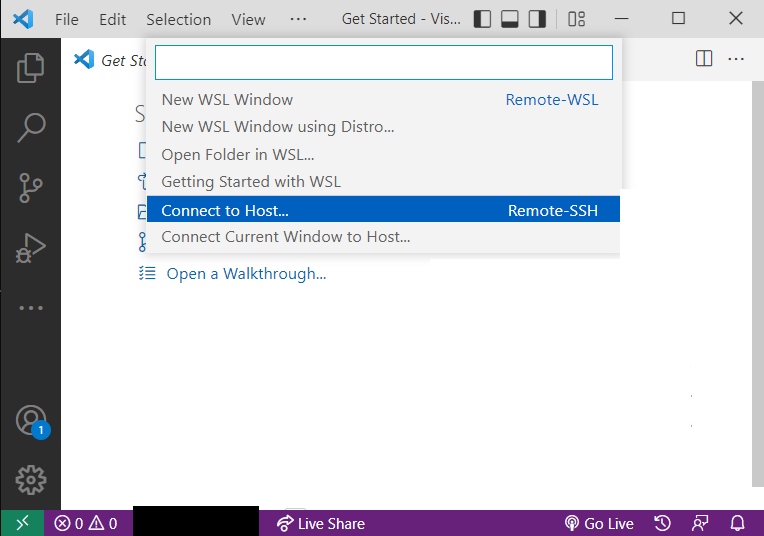
接着选Add New SSH Host
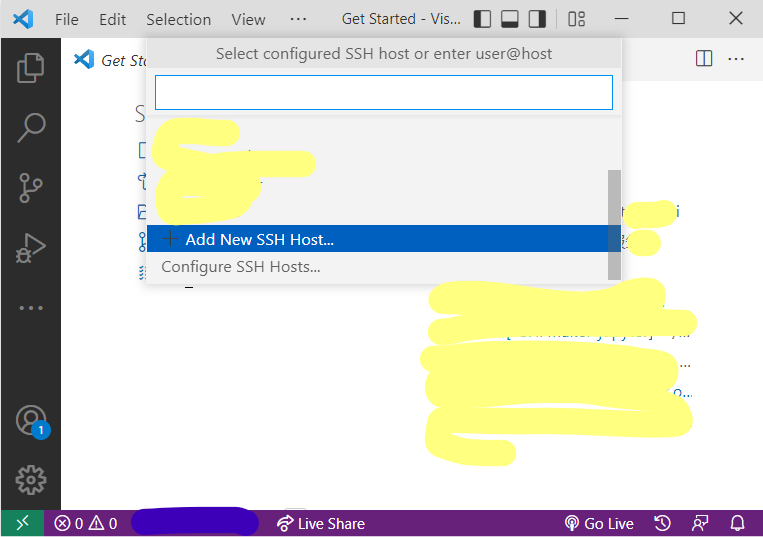
接着输入刚刚我们已经输入过一次的命令
ssh -A HwHiAiUser@192.168.3.31
其中-A的作用是启用Authentification Forwarding。
然后选择写入哪个ssh config,不懂就直接回车。

点击Connect之后会打开一个新的VS Code窗口,Code会问你目标主机的系统(选**Linux**),用户的密码(如果你还没改的话是Mind@123)。
每次远程都要输入密码非常烦人,所以采用ssh。没什么好说的,在本机上打开powershell(Linux用户打开bash)
ssh-keygen
一路回车之后
cat ~/id_rsa.pub # 如果你生成的不是RSA密钥你应该比我明白所以我就不多写了你就自己看着来吧
把这里的内容,打开~/.ssh/authorized_keys,复制进去。
ModelArts
ModelArts提供了企业级环境。
不过我们的第一个任务是手写数字识别,在一般CPU上就可以完成训练,所以我们直接在本机运行,方便直观。
conda create -n ms python=3.9 mindspore-cpu=1.7.0 -c mindspore -c conda-forge -y
进阶应用开发
DVPP 与 AIPP
这两个更是企业级。
总结与展望
更多应用
- 序列
- 音频
- 点云
推荐学习资源
https://www.hiascend.com/zh/developer/courses/detail/387264598548287488
从失败中救赎
启动失败
四灯没有亮起说明启动失败,请尝试重新烧录镜像。