2.1感知机是什么
感知机接收多个输入信号,输出一个信号
0对应不传递信号,1对应传递信号
只有当这个总和超过 了某个界限值时,才会输出1
这个界限值称为阈值,用符号θ
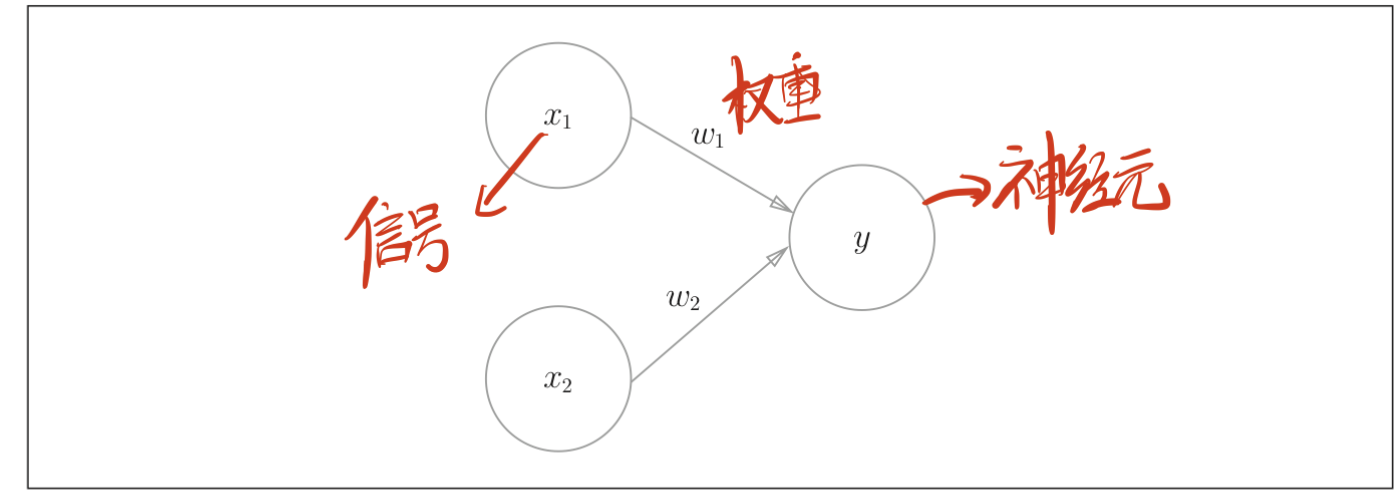
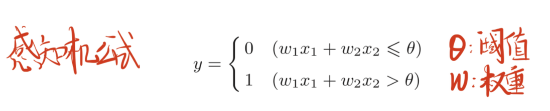
权重越大,对应的信号重要性越高
2.2导入权重和偏置
首先把感知机公式的θ换成−b,那我们就得到了这个式子
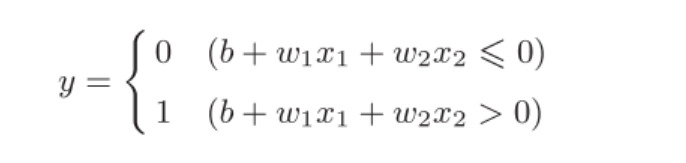
b称为偏置,w称为权重

2.3感知机的局限性
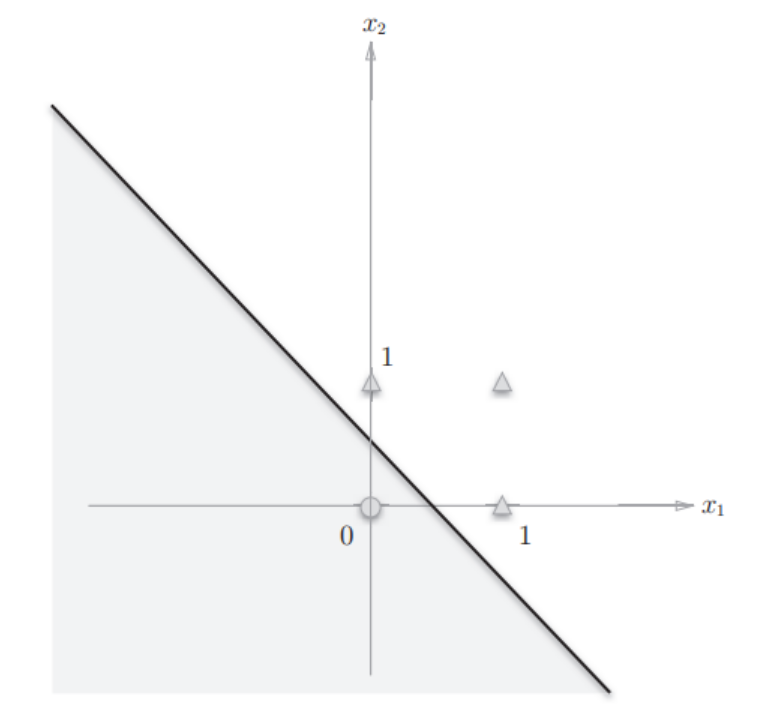
一维感知机的公式表示为直线,将界面分成上下两个区域,可以将输出0和1分开
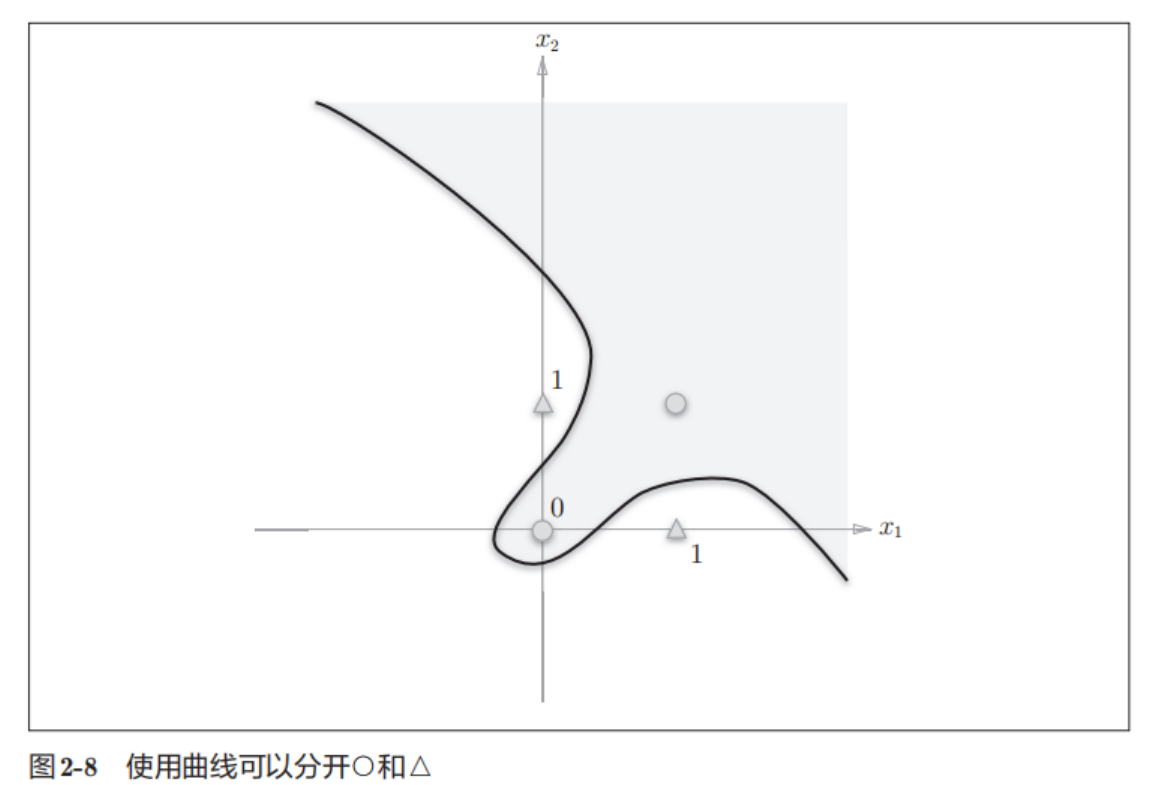
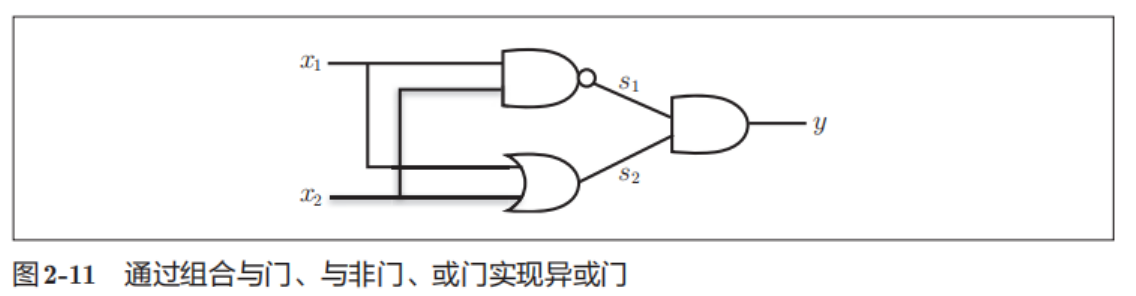
如果我们要实现异或门,则无法用直线来进行分割
直线为线性的,由此引入非线性的概念
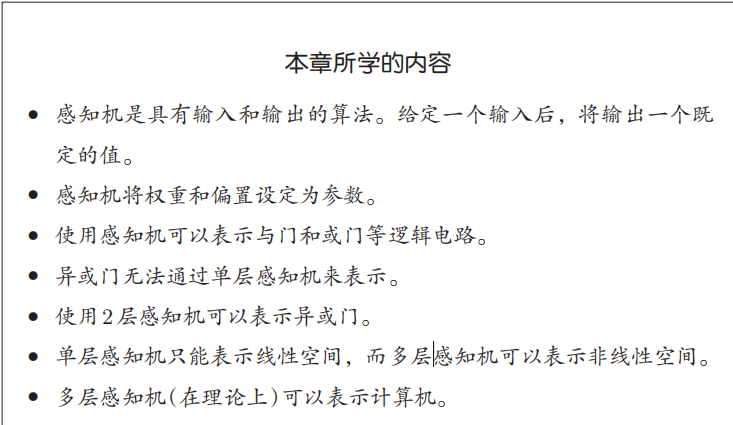
2.4多层感知机
一维感知机不能分离出非线性空间,可以通过逐层叠加感知机来实现
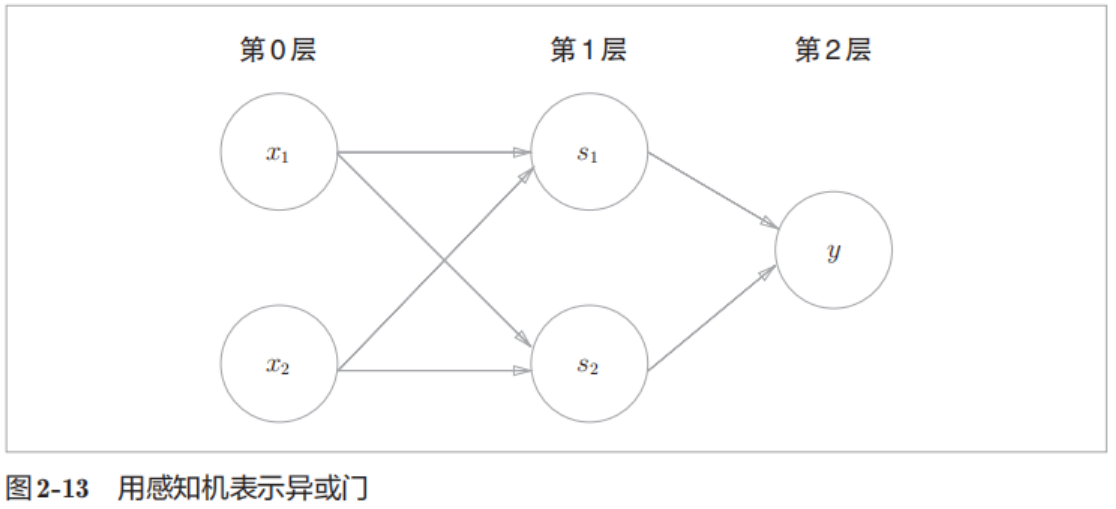
将最左边的一列称为第0层,中间的一列称为第1层,最右边的一列称为第2层